
どんなもの
NIC に接続された EtherCAT スレーブとの通信設定ができます。レーブメーカが作成するESIファイルから、ENIファイル(WMX独自ファイル)を作成するアプリになります。
ノイズなどの通信障害の診断も可能です。
日本語の公式ドキュメントは”C:\Program Files\SoftServo\WMX3\Doc\JP\EcConfigurator_UserManual_JP.pdf”にあります。
アプリの起動方法
WMX3のAgentアプリから起動できます。 このアプリがない場合は、”C:\Program Files\SoftServo\WMX3\EcConfigurator.exe”にあります。
このアプリを使用するタイミング
このツールは、EtherCATネットワークに接続されたスレーブデバイスの検出、物理接続の確認、および初期設を行うときに使用します。
新規EtherCATスレーブデバイスの組み込み時
新しいスレーブデバイス(例: サーボドライブ、I/Oモジュール)をEtherCATネットワークに追加する際には、以下の目的でこのツールを使用します。
PDO (Process Data Object) の設定: 新しいスレーブデバイスのPDOマッピングを行う際に不可欠です。例えば、Panasonic製サーボドライブをトルク制御モードで使用する場合、特定のPDO(例: トルク指令値、現在トルク)を割り当てる必要があります。
パケットサイズ情報の取得: スレーブデバイスがサポートする最大パケットサイズや、PDOのデータ量を事前に把握することで、ネットワークの帯域幅計算や、リアルタイム性能の評価に役立ちます。
EtherCATネットワークのトラブルシューティング時
新規システムの立ち上げ時や、既存システムで予期せぬデバイス認識エラーが発生した場合に、このツールは以下の状況で特に有効です。(WMXで制御するモータ番号が変わったなど)
物理配線の異常: EtherCATケーブルの接続順序が間違っている、または断線している場合。
スレーブデバイスの初期設定確認: モータードライバーやI/Oモジュールなどのスレーブデバイスが、物理的に正しく接続され、基本的な設定が完了しているかを確認する最初のステップとして活用します。
スレーブの設定手順
ESIファイルの準備
- スレーブメーカーより製品ごとのESIファイルを入手してください。ホームページからダウンロードできます。 ホームページにない場合は、購入先かへ問い合わせてください。
- スレーブ開発メーカが作成したESIファイル(xml)を[C:\Program Files\SoftServo\WMX3\ESI]に配置します。
ENIファイルの作成
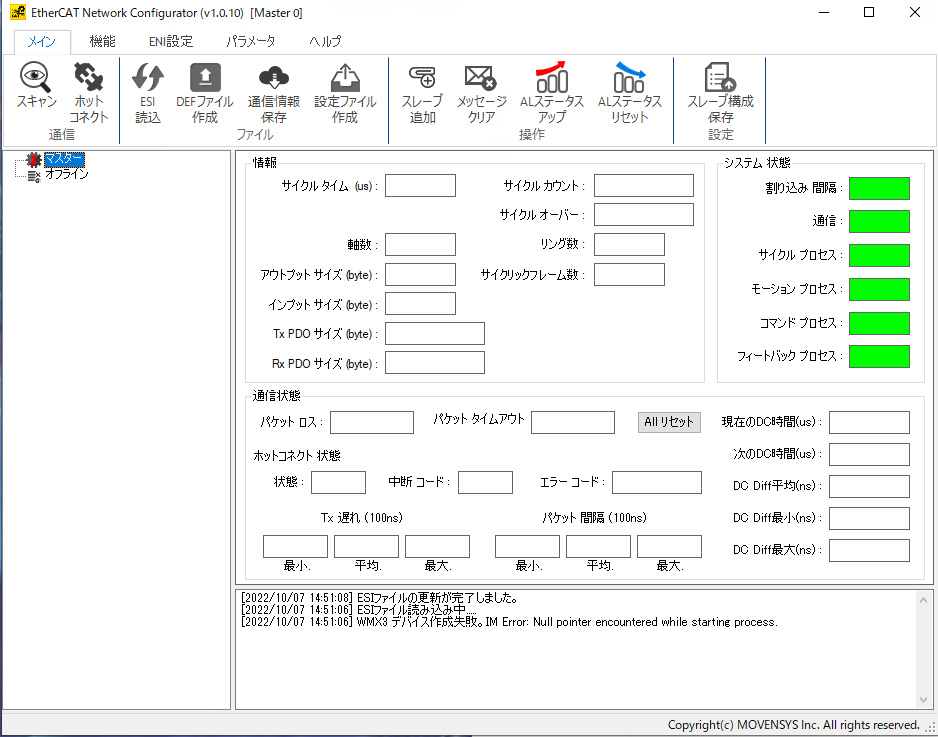
- EcConfiguratorで設定
- [ENI設定]タブを開きます
- 読み込みボタンを押しスレーブのファイルを指定します(UIに読み込まれます)
- スレーブのディバイスタイプを指定します(サーボ or IO)
- サーボの場合は補助ボタンのアシスト設定を行うと基本のPDOのマッピングが完了します
- I/Oなどのユニットを連結して使用するモジュラーデバイスの場合は[モジュールボタン]を押し、組み込んだタイプを指定してください(接点の数違いでタイプが複数に分かれています)拡張モジュール分追加を行います。
- 足りない機能がある場合は手動でオブジェクトにチェックを入れてください
- 保存ボタンを押します
- C:\eni\にeniファイルが自動生成されます
ENIファイルが正しく設定できていないときは、通信開始時にスレーブのエラーが出ます。
ランタイムライセンスがないときの挙動
ライセンスなしの時はマスターにスレーブが表示されません。
設定ファイルのバックアップ
ENIファイルは同じ装置(リピート機)のセットアップに必要になります。
同じ装置を複製する場合の手順
1、オリジナル装置のC:\eniフォルダーを丸ごとコピーします。
2、コピー元装置のC:\eniフォルダーにコピーします。
以上です。
コメント