
WOSとはWMX Operating Stationです。
どんなもの?
コーディング不要でモーション動作を行う事ができます。
ネットワーク(EtherCAT またはフィールドバス)の設定やサーボ 、I/Oの制御を行う事ができます。装置立ち上げや開発時の電気的動作確認で使用します。
コーディング前にモーション動作(線形・円弧・ヘリカル・スプライン)で軸を動作させることができます。
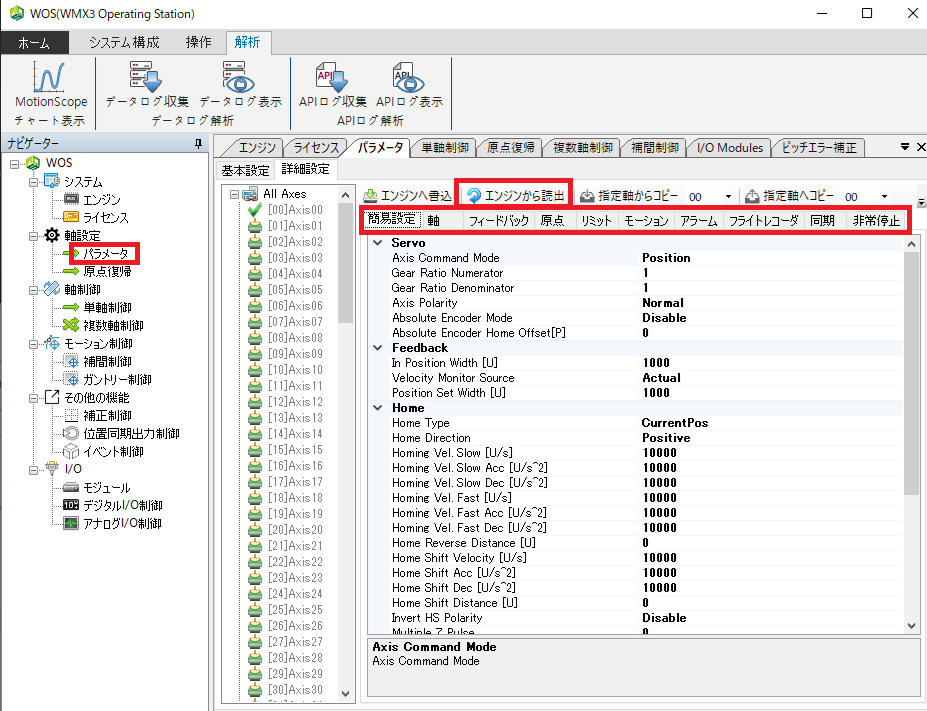
軸の設定
自作アプリ(プログラム)の開発時、軸の設定が正しくできているかを確認したい時があります。こちらの画面で現在のパラメータを一覧で見ることができます。”エンジンから読み出し”ボタンを押すとほかのアプリで設定した情報が表示されます。
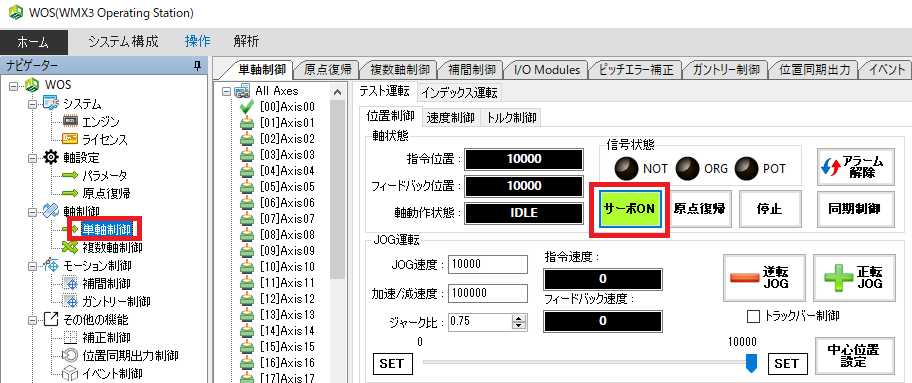
マニュアルでサーボON
サーボONできないときは、アンプがエラーを出していないかを確認してください。
アラームクリアコマンドがあります。
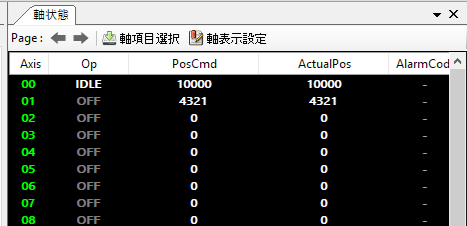
軸の現在座標を表示

WMX3 Consoleアプリと同じ機能ですね。指令座標とエンコーダ座標が表示されています。
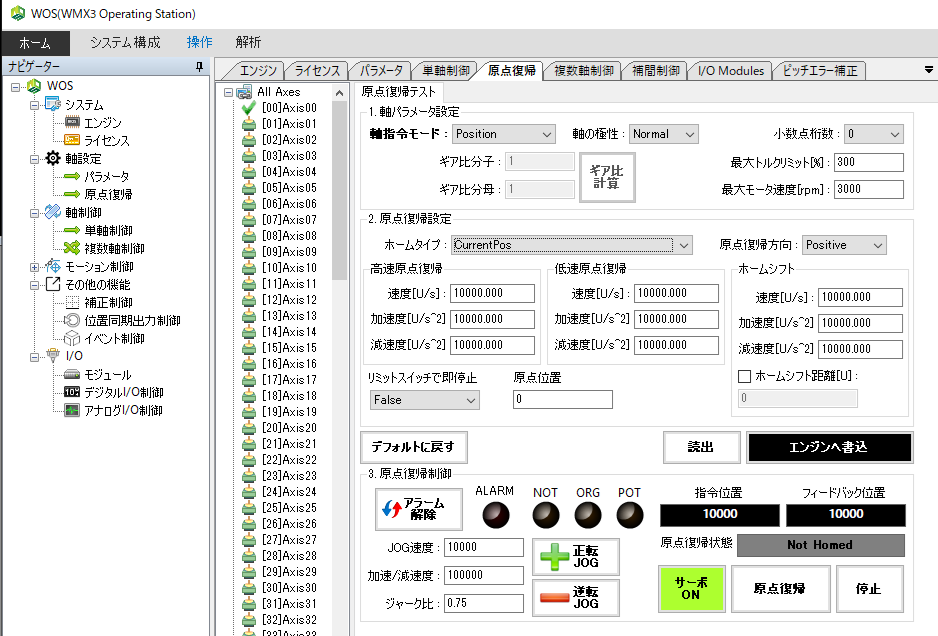
軸の原点復帰を行う
[Essential]タブを開きます
原点センサ・サーチスピードを設定します
[WOS Navigator]で、[Setup] カテゴリ内の [Homing]で原点復帰が行えます
モータ制御
速度制御・トルク制御に切り替えた時の挙動を確認できます。
トルク制御
[Torque]タブでは、選択された軸のトルクグラフから指令トルクと実際のトルクをリアルタイムで
確認することができ、トルク出力の Max、Positive、Negative Limit を設定することができます。
(Torque タブを有効にするには、Parameters の Axis Command Mode を変更する必要があります
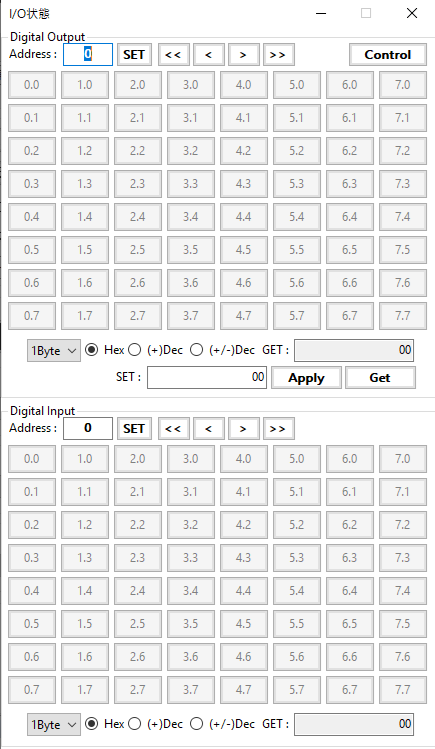
デジタルI/Oの制御
こちらのメニューから画面が表示できます。

I/Oの各bit単位で状態をリアルタイムに表示します。
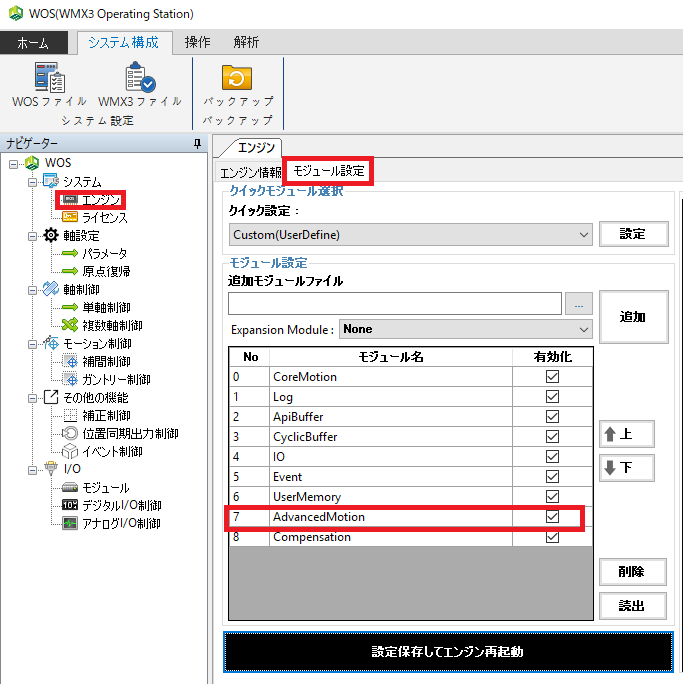
WMXの機能追加設定
電子カムを使用するには、”Advancedmotion”モジュールを有効にする必要があります。”エンジン”タブの”Advancedmotion”にチェックを入れて”設定保存しえエンジン再起動”を押すと有効化されます。
Module Parameter Configurator 機能
通信している接続スレーブのパラメータ情報を読み取り、SDOの確認が出来ます
表示言語の切り替え
リボンメニューの[Home]タブで Option をクリックします。 Langageで切り替えることができます。
その他の機能
[Cycle Information]では、通信サイクル関連の情報を確認することができます。
[Motion Scope]は、モーションプロファイルや軸のデジタル I/O などのデータを測定して分析するチャート分析ユーティリティです
[API ログ]呼び出した関数を記録している? 私は使ったことがありません。

コメント